
一、教育背景
武汉大学电气工程专业 博士研究生
湖北工业大学电力系统及其自动化 硕士研究生
湖北理工学院 本科
二、负责(参与)科研项目及成果
在校期间项目:
[1] “十二五”总装预研项目《大质量线圈发射技术研究》
在校期间论文:
[1] Research of Varying Frequency Driving Scheme for Asynchronous Induction Coil Launcher[J]. IEEE Transactions on Plasma Science, 2017, PP(99):1-7. (SCI收录号:000405349600078;EI收录号:20173704156483)
[2] 电流环暂态模型在异步感应线圈发射器中的应用[J]. 电工技术学报, 2018, 33(17):3997-3999.
三、当前负责(参与)科研项目
1、惠州亿纬锂能股份有限公司 圆柱产品线 工厂总经理
主持完成18650锂电池金额优率改善项目自动化工程、锂电池卷绕生产工序效率提升自动化工程、锂电制造极片工序精益改善项目,收益合计约800万/年。
2、深圳优必选股份有限公司 高级工程师
[1] 25kg机器人伺服关节研制,该款关节应用于大型机器人Walker的手腕处,机器人Walker于2020年参加了“逐梦先行——庆祝深圳经济特区建立40周年文艺晚会”以及2021年迪拜世博会。
[2] 机器人关节综合调试系统研制,所开发的机器人调试系统广泛应用于公司的研发部、测试部、生产部,以及客户。不仅加快了研发工程师的项目开发进度,还提高了测试部和生产部的工作效率,降低人工成本。

四、研究方向
1、基于STM32的电机控制算法实现
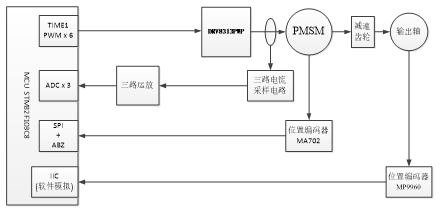
基于STM32电机控制框图
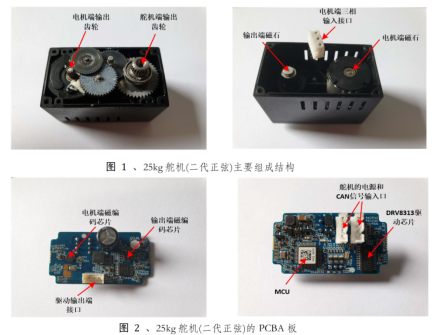
机器人伺服驱动关节结构图
五、具体研究重点及目标
聚焦于机器人伺服关节的能效优化与低成本硬件实现,致力于通过跨学科技术融合推动工业自动化与智能装备领域的创新发展。在能效提升方向,基于自适应参数辨识理论,构建伺服关节动力学模型的实时优化机制,通过高精度传感器数据采集与卡尔曼滤波算法,动态识别电机惯量、摩擦系数等关键参数,结合模型预测控制策略实现能量损耗的精准调控。
 微信公众号
微信公众号
 抖音号
抖音号